Motor Acceleration Time With BricsCAD and InPower 1.03.03

"Motor acceleration time is important in electrical engineering for ensuring system stability, preventing equipment damage, and coordinating protective devices. Proper acceleration time allows for smooth motor startup without disrupting the power supply or connected mechanical systems"
Given this example, InPower will be used to simulate large industrial motor starting.
Comments
-
INPMOTORSIM command is used to simulate motor starting.
Motor data and motor load data is entered into the InPower motor and torque load blocks.
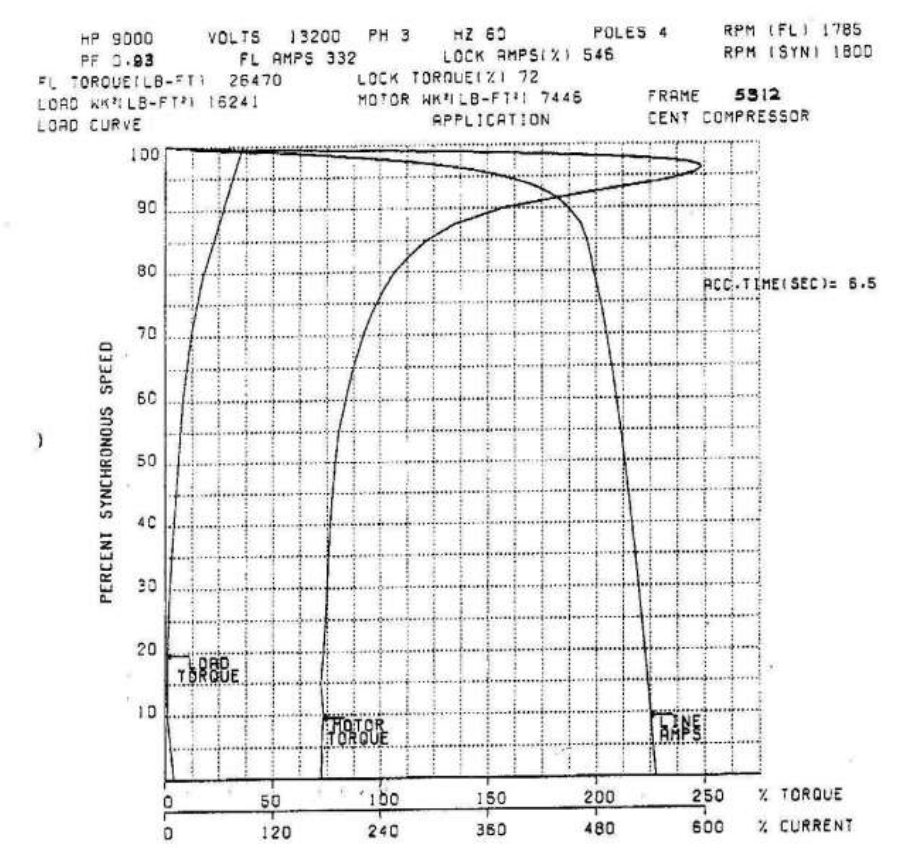
Motor Simulation M-16
Name M-16
MTorqueLoad TORQUELOAD0
Motor volts 13.200000
V_NOMINAL 13.200000
N_S 1800.000000
N_R 1785.000000
JM 7446.000000
Z_SOURCE 0.000001 0.000001j
PF_RUNNING 0.850000
PF_NOLOAD 0.092900
PF_STARTING 0.180000
I_LRA 1812.720000
I0 40.000000
Rs 0.012500
FLA 332.000000
FREQ 60.000000
T_FLT 26470.000000
TIME_STEP 0.010000
MAX_TIME 100.000000
STARTERTYPE 0
V_REDUCE 0.900000
STARTERTIMER 20.000000
useZbusImp 0
0 SPEEDM 0.000000 SLIPM 0.000000 TMTR 0.721398
1 SPEEDM 0.151843 SLIPM 0.000000 TMTR 0.717215
2 SPEEDM 0.546626 SLIPM 0.000000 TMTR 0.795364
3 SPEEDM 0.704510 SLIPM 0.000000 TMTR 0.913875
4 SPEEDM 0.787073 SLIPM 0.000000 TMTR 1.020205
5 SPEEDM 0.854299 SLIPM 0.000000 TMTR 1.201686
6 SPEEDM 0.890171 SLIPM 0.000000 TMTR 1.425672
7 SPEEDM 0.914285 SLIPM 0.000000 TMTR 1.672297
8 SPEEDM 0.931104 SLIPM 0.000000 TMTR 1.949278
9 SPEEDM 0.952199 SLIPM 0.000000 TMTR 2.326643
10 SPEEDM 0.963067 SLIPM 0.000000 TMTR 2.442586
11 SPEEDM 0.971981 SLIPM 0.000000 TMTR 2.480000
12 SPEEDM 0.979108 SLIPM 0.000000 TMTR 2.442015
13 SPEEDM 0.982265 SLIPM 0.000000 TMTR 2.400131
14 SPEEDM 0.984627 SLIPM 0.000000 TMTR 2.319807
15 SPEEDM 0.987885 SLIPM 0.000000 TMTR 2.115973
16 SPEEDM 0.991599 SLIPM 0.000000 TMTR 1.801865
17 SPEEDM 0.994963 SLIPM 0.000000 TMTR 1.189903
18 SPEEDM 0.995718 SLIPM 0.000000 TMTR 0.638633
19 SPEEDM 1.000000 SLIPM 0.000000 TMTR 0.000000
Motor[0].MTorqueLoad: TORQUELOAD0 TorqueLoad[0].Name: TORQUELOAD0
Name TORQUELOAD0
N_S 1785.000000
N_L 1785.000000
JL 16241.000000
T_FLTLOAD 26470.000000
DEN 0.076500
RHO_REF 0.076500
FAN 1
SG 1.000000
0 SPEEDL 0.000000 TLOAD 0.030750
1 SPEEDL 0.050279 TLOAD 0.013852
2 SPEEDL 0.102490 TLOAD 0.000000
3 SPEEDL 0.151677 TLOAD 0.000407
4 SPEEDL 0.196932 TLOAD 0.002495
5 SPEEDL 0.252146 TLOAD 0.007171
6 SPEEDL 0.302434 TLOAD 0.013388
7 SPEEDL 0.352740 TLOAD 0.021106
8 SPEEDL 0.451452 TLOAD 0.042506
9 SPEEDL 0.499463 TLOAD 0.053844
10 SPEEDL 0.548661 TLOAD 0.063141
11 SPEEDL 0.597810 TLOAD 0.075462
12 SPEEDL 0.648968 TLOAD 0.095580
13 SPEEDL 0.700201 TLOAD 0.115988
14 SPEEDL 0.750879 TLOAD 0.145020
15 SPEEDL 0.800554 TLOAD 0.176593
16 SPEEDL 0.849972 TLOAD 0.225411
17 SPEEDL 0.900227 TLOAD 0.273387
18 SPEEDL 0.951200 TLOAD 0.319336
19 SPEEDL 1.000000 TLOAD 0.3700000 -
The motor starting simulation is then run with INPMOTORSIM and exported to /var/log/inpower.out
Motor Simulation M-16
Squirrel Cage Induction Motor Starting Simulation. Iteration:1
Squirrel Cage Induction Motor Starting Simulation. Iteration:2
Time,RPM,Volts,Amps,Tmotor(ftlb),Tload(ftlb),Tnet(ftlb)
0.000,0.000,13199.996,1812.719,19095.394,813.952,18281.442
0.220,52.427,13199.996,1823.761,19074.690,600.908,18473.782
0.435,104.323,13199.996,1821.861,19053.699,339.362,18714.337
0.650,156.665,13199.996,1819.767,19032.501,199.177,18833.324
0.865,209.518,13199.996,1817.448,19011.074,5.788,19005.286
1.080,262.481,13199.996,1814.891,18989.572,10.174,18979.398
1.295,315.481,13199.996,1812.068,19109.888,49.014,19060.874
1.510,368.820,13199.996,1808.921,19271.838,97.569,19174.269
1.725,422.420,13199.996,1805.404,19433.224,163.526,19269.698
1.940,476.293,13199.996,1801.457,19594.094,246.839,19347.255
2.155,530.337,13199.996,1797.014,19754.164,338.886,19415.278
2.370,584.537,13199.996,1791.991,19913.408,464.547,19448.860
2.585,638.835,13199.996,1786.292,20071.674,595.860,19475.813
2.800,693.058,13199.996,1779.813,20228.502,805.350,19423.152
3.015,747.203,13199.996,1772.409,20383.892,970.407,19413.485
3.230,801.357,13199.996,1763.888,20538.127,1111.229,19426.899
3.445,855.482,13199.996,1754.026,20691.140,1303.091,19388.049
3.660,909.514,13199.996,1742.551,20842.768,1475.262,19367.506
3.875,963.521,13199.996,1729.090,20993.226,1626.358,19366.868
4.090,1017.746,13199.996,1713.105,21435.820,1816.470,19619.350
4.305,1073.079,13199.996,1693.604,22070.671,2028.225,20042.447
4.520,1129.376,13199.996,1669.573,22698.471,2366.343,20332.128
4.735,1186.505,13199.996,1639.639,23318.279,2699.283,20618.996
4.950,1244.395,13199.996,1601.876,23929.990,3033.246,20896.744
5.165,1303.108,13199.996,1553.492,24854.634,3531.329,21323.305
5.380,1363.506,13199.996,1489.516,26005.267,4059.769,21945.498
5.595,1425.529,13199.997,1403.480,27319.674,4631.897,22687.777
5.810,1491.275,13199.997,1281.604,29993.496,5595.777,24397.719
6.405,1751.873,13199.999,297.704,65563.165,9251.410,56311.755
6.595,1797.002,13200.000,49.240,10617.551,9963.940,653.611
Total motor acceleration time: 6.595 Sec.
Motor starting voltage drop: 0.004V 0.000%.
Simulation complete.0 -
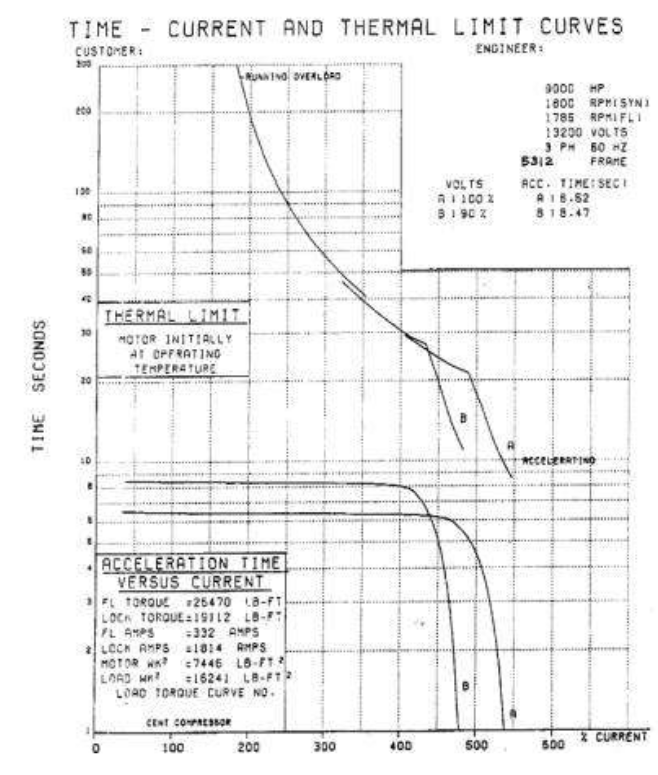
The optional time current curve is generated when needed.
 0
0 -
A reduced voltage starter can be added for lowering the starting current.
STARTERTYPE 1
V_REDUCE 0.900000
STARTERTIMER 20.000000Motor Simulation M-16
Squirrel Cage Induction Motor Starting Simulation. Iteration:1
Squirrel Cage Induction Motor Starting Simulation. Iteration:2
Time,RPM,Volts,Amps,Tmotor(ftlb),Tload(ftlb),Tnet(ftlb)
0.000,0.000,11879.997,1631.448,15467.270,813.952,14653.317
0.280,53.565,11879.997,1641.341,15450.049,594.148,14855.902
0.555,107.056,11879.997,1639.572,15432.523,332.996,15099.528
0.830,161.132,11879.997,1637.612,15414.783,181.359,15233.424
1.105,215.900,11879.997,1635.428,15396.795,6.500,15390.296
1.380,270.756,11879.997,1633.011,15378.754,10.713,15368.041
1.655,325.691,11879.997,1630.330,15504.786,54.326,15450.460
1.930,380.964,11879.997,1627.328,15640.485,116.182,15524.304
2.205,436.467,11879.997,1623.960,15775.571,177.005,15598.566
2.480,492.185,11879.997,1620.166,15910.036,277.535,15632.501
2.755,548.022,11879.997,1615.878,16043.654,374.781,15668.873
3.030,603.902,11879.997,1611.014,16176.279,506.499,15669.780
3.305,659.765,11879.997,1605.476,16307.790,685.349,15622.442
3.580,715.362,11879.997,1599.167,16437.634,877.885,15559.749
3.855,770.805,11879.997,1591.925,16566.098,1034.800,15531.298
4.130,826.165,11879.997,1583.554,16693.386,1199.360,15494.027
4.405,881.307,11879.997,1573.840,16819.219,1389.601,15429.618
4.680,936.267,11879.997,1562.485,16943.704,1552.670,15391.034
4.955,991.126,11879.997,1549.097,17112.613,1714.711,15397.902
5.230,1046.617,11879.997,1532.957,17635.687,1922.704,15712.983
5.505,1103.136,11879.997,1513.123,18153.008,2216.823,15936.185
5.780,1160.317,11879.997,1488.599,18661.834,2535.643,16126.192
6.055,1218.098,11879.997,1457.910,19162.294,2888.004,16274.290
6.330,1276.392,11879.997,1419.035,19710.798,3304.691,16406.107
6.605,1335.708,11879.997,1368.631,20645.350,3794.826,16850.524
6.880,1396.430,11879.997,1301.727,21560.242,4375.875,17184.366
7.155,1459.158,11879.997,1210.568,23273.545,5135.140,18138.406
7.430,1525.969,11879.997,1079.875,25374.951,6083.238,19291.713
8.065,1752.920,11879.999,258.850,53140.818,9279.521,43861.297
8.280,1795.391,11880.000,50.493,10640.380,9941.166,699.214
Total motor acceleration time: 8.280 Sec.
Motor starting voltage drop: 1320.003V 10.000%.
Simulation complete.0 -
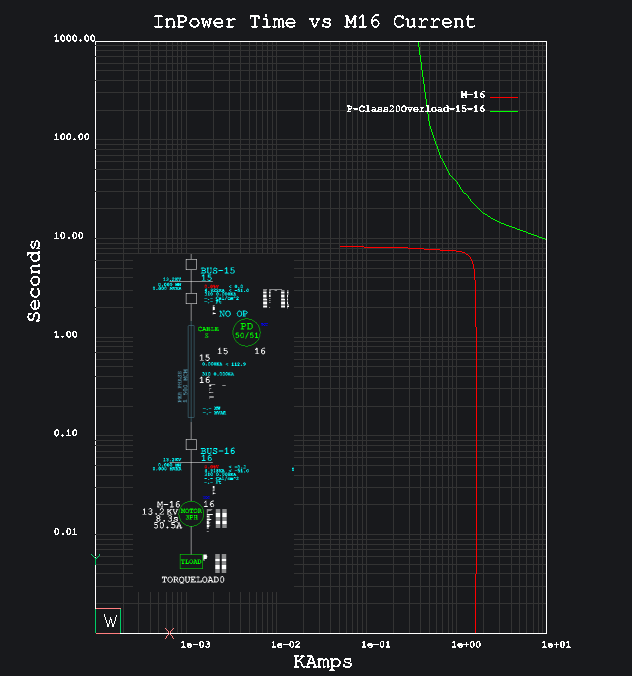
Motor protective devices can be added to the simulation and checked against the starting current for coordination.
 0
0 -
A more real world simulation with 65% reduced voltage starter and source impedance included.
TARTERTYPE 1
V_REDUCE 0.65
STARTERTIMER 25.0
useZbusImp 1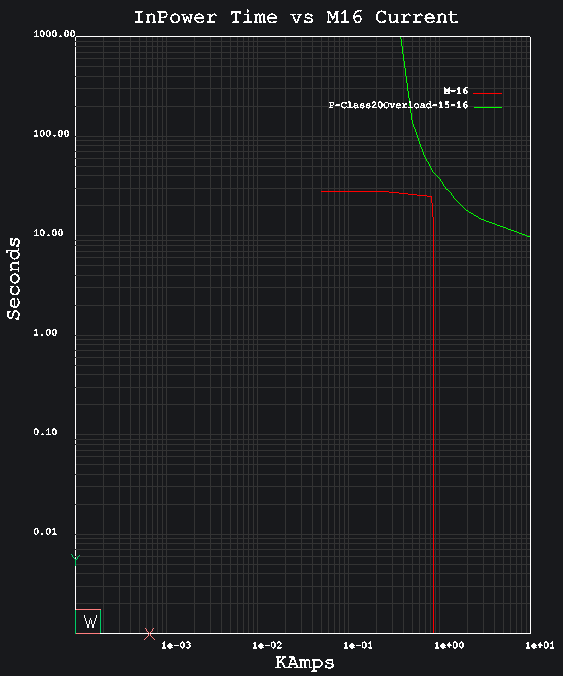 0
0