Bubble Not visible
I am new in BricsCAD. In fact brand new in this BIM world. So do not throw with stones
I have a 3D laser scanner from FARO. So far I had used software from FARO, CloudCompare, MeshInspector and so on.
But yesterday I discover BricsCAD and I said to try it. Looks most perfect tools so far to get 3D and 2D drawings (I am still learning from videos) from point clouds.
BUT (always is a "but") I have a problem to say it so. I open BricsCAD in BIM module. I import pointcloud in e57 format. Everything works ok. Problem is that I can't see bubbles.
I use POINTCLOUDSHOWBUBBLES command, I loook in propoerties, I change the view to BIM not wireframe. No bubble appear.
I really do not know what is whong and how I should solve this issue to see bubbles (scan positions)
I imported in *.e57 and *.rcs format and I am not able to see them.
I use BricsCAD V24 Ultimate (trial version).
OR exist any way to import FARO projects inside BricsCAD ?
If someone need to look at it, maybe is a problem from me, I even can share pointcloud
e57 format: https://www.dropbox.com/scl/fi/8uzqne4i25c3j2gam88kt/PointCloud_export.e57?rlkey=cbnc5peh0nsf78unffyd05bur&dl=0
rcs format: https://www.dropbox.com/scl/fi/u18nvpe5zqitmw989hq42/Susteni_Office.rcs?rlkey=mumabnuf10z1gf4mu4pmwo1sb&dl=0
See a picture how it looks like
https://ibb.co/5Yww00m
Comments
-
Bubbles only exist with 'structured' scan data i.e. from a fixed scan position, not from 'unstructured' e.g. from drone fly-past. Or something like that.0
-
I understand, but I have these scans from fixed positions using FARO FOCUS scanner and a tripod.
See scanner I use: https://ibb.co/R4Ly0hX
And all scans are registered already and exported as pointcloud from FARO SCENE.
0 -
When exporting the pointcloud, you should make sure that the scan positions are also included in your export. From having a look at the files attached, you have not included the scan positions in the export and all the different scans have merged into one. That's why the bubbles cannot be created.0
-
Thanks omid.ekrami@hexagon.com,
that sounds like a good idea.
So when I try do my iPhone Lidar Scans "radial" from a "fixed" point,
I could edit the PTS file to include my (estimated) camera Position ....
and get a Bubble ?0 -
Thanks man. So if you confirmed that scan position are not included that means is not a problem from BricsCAD. Then I have to go back to FARO SCENE and see what I can do.omid.ekrami@hexagon.com said:When exporting the pointcloud, you should make sure that the scan positions are also included in your export. From having a look at the files attached, you have not included the scan positions in the export and all the different scans have merged into one. That's why the bubbles cannot be created.
0 -
@Michael Mayer PTS files are not structured, and as far as I know you cannot include scanner position data in them. If you can export to e57 and then modify the e57 header to include rowIndex and columnIndex (not sure if possible) then theoretically this could work.1
-
This is from FARO website:
Details
An ordered scan is recorded by a Laser Scanner with data records that include position, reflectance, and color for single scan points. These points are organized with row and column information.
An unordered scan is a collection of points in space. These point cloud scans are organized in a spatial data structure that facilitates fast visualization of scan points and automated point loading based on point visibility.
Unordered scan formats include: E57, VRML, DXF, XYZ Text, XYZ Binary, IGES, PTS and POD.
Ordered scan formats include: FLS and PTX.
I will check now with e57. These are options I have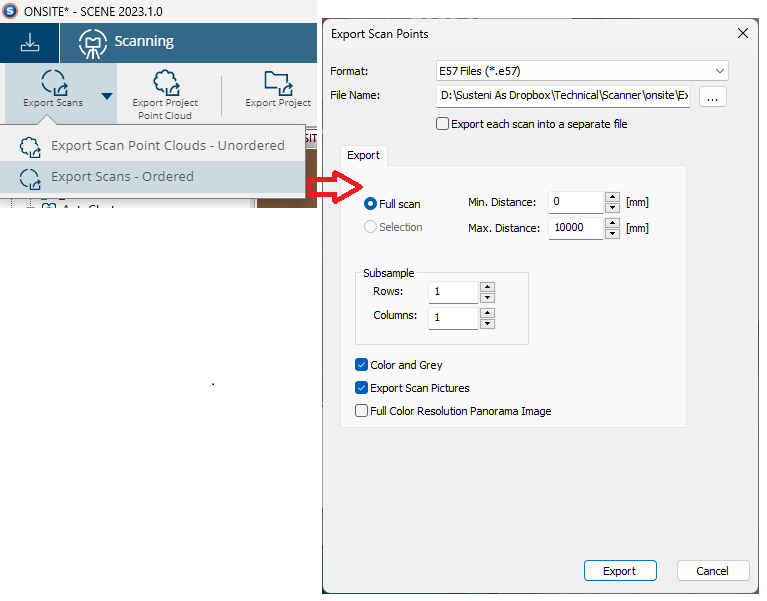
1 -
Using the "Ordered" option should do the trick.0
-
I am comming with news. GOOD news.
Seems that exports e57, with ordered scans, I was able to get also bubbles.
Thanks to all for help.
Itinial I export regullary point clouds. But this seems to make difference
0 -
by the way, if you increase the value of POINTCLOUDPOINTMAX you would probably get a better visual quality. But higher numbers might decrease performance, depending on the configurations of your system.1
-
Thanks, I will try that .....OmidEkrami said:@Michael Mayer PTS files are not structured, and as far as I know you cannot include scanner position data in them. If you can export to e57 and then modify the e57 header to include rowIndex and columnIndex (not sure if possible) then theoretically this could work.
0 -
BTW,OmidEkrami said:by the way, if you increase the value of POINTCLOUDPOINTMAX you would probably get a better visual quality.
could it be that dynamic point size does no more work on (M1) Mac ?
It thought it might be V24 but I just tried V23 and it does not work also.
So maybe since macOS 14 Sonoma ?
(It is activated in Settings and Ribbon)
0 -
Thanks. I will test as well that.OmidEkrami said:by the way, if you increase the value of POINTCLOUDPOINTMAX you would probably get a better visual quality. But higher numbers might decrease performance, depending on the configurations of your system.
Configurations is not a problem. I have a powerfull desktop machine with i9 12900k, RTX A4000 graphic card and 64Gb RAM.
0 -
Hmmh,OmidEkrami said:@Michael Mayer PTS files are not structured, and as far as I know you cannot include scanner position data in them. If you can export to e57 and then modify the e57 header to include rowIndex and columnIndex (not sure if possible) then theoretically this could work.
I looked at my PTS in Editor.
For me that looks pretty structured, like a CSV or so
But I when I grabbed the next available e57 on my disk,
it looks like illegible machine language,
it is only at the bottom of the file where it looks readable.
Or did I accidentally opened some kind of compressed e57.0 -
PTS files are text files, that why you can see the content clearly in a text editor.
Being "structured" is not about the format of the content of the file, but it's about the order of the points. Points should be saved in order of rows and columns (r0c0, r0c1, r0c2, etc.). PTS files are by definition unstructured, so probably no software will treat them as structured no matter the order of the content.
e57 files are binary files, that's why you cannot see the content with a text editor. Depending on the content of the file, the bytes need to be read and the information will be constructed from the bytes.
1 -
So Raro say E57 is an unordered format but it seems can be successfully imported ordered; and omid.ekrami@hexagon.com says PTS is not ordered but MM says ' looks pretty structured'.
My one time with pointclouds, the survey showed only one bubble, which after much agony was eventually explained (at that time undocumented) because it was mainly unstructured - pretty rubbish actually - which was really frustrating as things like plane detection work so much better (if at all) with bubbles.0 -
@Tom Foster e57 files can be ordered/structured or unordered, this all depends the type of scanner used and the options selected when exporting the file.
0 -
Thanks for all those insights.OmidEkrami said:@Tom Foster e57 files can be ordered/structured or unordered, this all depends the type of scanner used and the options selected when exporting the file.
0 -
If you have to ask for the price it's not for youtehnics said:using FARO FOCUS scanner and a tripod.
See scanner I use: https://ibb.co/R4Ly0hX
I see those device are around 30-50 Lidar iPhone units.
I think I will stay with my iPhone for now .....
0 -
Correct.OmidEkrami said:@Tom Foster e57 files can be ordered/structured or unordered, this all depends the type of scanner used and the options selected when exporting the file.
e57 is just file format and how data is stored. Inside of the file, points can be ordered or not ordered.0 -
Yes, are very expensive equipments but accuraccy and scan volume is more above the what LiDAR phones cand deliver.Michael Mayer said:
If you have to ask for the price it's not for youtehnics said:using FARO FOCUS scanner and a tripod.
See scanner I use: https://ibb.co/R4Ly0hX
I see those device are around 30-50 Lidar iPhone units.
I think I will stay with my iPhone for now .....
I say this because I have iPhone 12 pro with LiDAR and I test several 3D scaning applications (Kiri Engine, Scaniverse, Luma, PolyCAM. None offer such detailed and accuracy as laser scanner.
For example how You scan at high altitude with LiDAR and to get 1mm precision ?
And, this is nothing, Leica are way more expansive than FARO
0 -
Interesting.tehnics said:
I say this because I have iPhone 12 pro with LiDAR and I test several 3D scaning applications (Kiri Engine, Scaniverse, Luma, PolyCAM. None offer such detailed and accuracy as laser scanner.
I will look at the Apps on your list.
There are tons of them and Apple Store is not really thought to search and find Apps.
Web search was not very helpful so far too.
I am aware of the limitations and accuracy of the Lidar.
But it is sufficient for my purposes.
I am currently using or testing Nomad App from Vectorworks only.
It does reality capture by :
- Photogrammetry
- Room Plan (simple geometry)
- Point Cloud
- Measure App (did not really get into that UI or usage so far)
I am currently not sure if the issues are caused by the App or are a limitation
of Hardware or Apple APIs.
The problem for me so far is the crappy Mesh output from Room Plan,
noise or best practice for Point Clouds. And I miss an option to define
an origin and align rotation to a building.
Can you remember if any of the Apps you tested did better ?0 -
Also I wonder how stationary Pro Scanners will finally align
different scan position's Pointcloud.
Is that all done by Software or do these somehow keep awarenes
of their position/locationorientation when brought to a new room.0 -
The problem for me so far is the crappy Mesh output from Room Plan,
noise or best practice for Point Clouds. And I miss an option to define
an origin and align rotation to a building.
Can you remember if any of the Apps you tested did better ?
This is most known issue. That's why LiDAR is just for hobbyes. Might be also hardware limitation but you can't get accuraccy with these softwares on phones.
Best and best App I tested and was extremly good resuls do not exist anymore: Trnio. Was the best. And Trino did not use LiDAR, only photogrametry but I get very nice 3D models with just an iPhone6.
Rest of them has + or - in different conditions. Do not exist better than other.
If You want to know discussions, You can join their Discord servers and see tips and tricks. Really nice info You will get from there.
Stationary scanners has "registration markers" to know what was their positions. In picture below I use "sphere" as markers. And software compare several scans and find out similar markers. Or manually can assign match points or planes between 2 scans and then software put on position scans. This is called "Registration Proccess".Michael Mayer said:Also I wonder how stationary Pro Scanners will finally align
different scan position's Pointcloud.
Is that all done by Software or do these somehow keep awarenes
of their position/locationorientation when brought to a new room.
See a picture from FARO SCENE how this registration is done.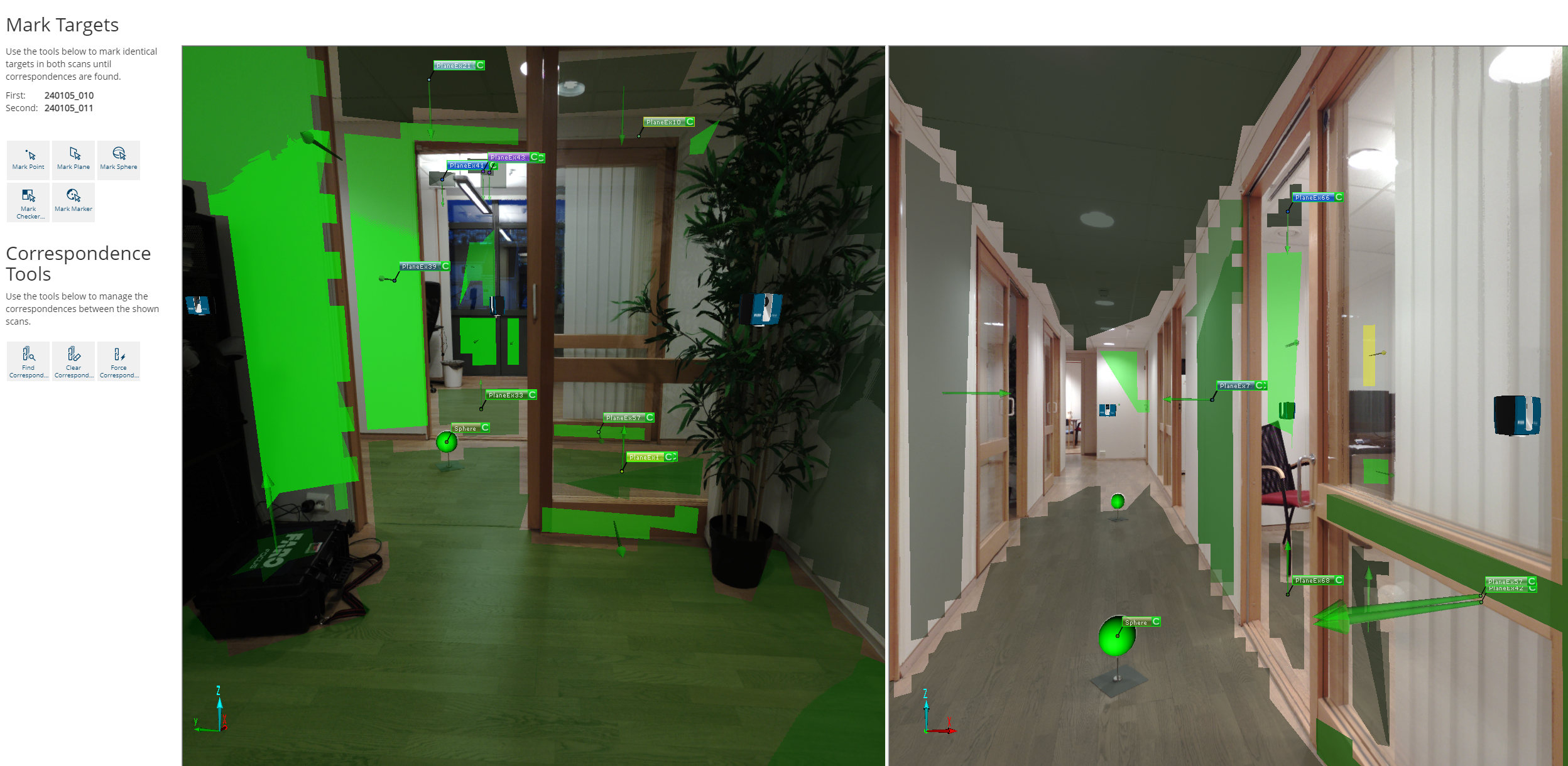
Leica scanners has a better way, have several external camera which follow movement and recognize how much you move scanner on X, Y and Z and know exactly what is new position of the scanner. This is good because you can match 2 scans without markers. But Leica scanner cost a fortune... about 90 000 euro one scanner.
0 -
Oh, Trnio is retired and gone from App Store.
Do you mean physical registration markers that you spread in the building
and put the scanner on after each other ?
(What if someone kicks against one during scanning ?)
0 -
I know, but was one of the best I tested.Michael Mayer said:Oh, Trnio is retired and gone from App Store.
Do you mean physical registration markers that you spread in the building
and put the scanner on after each other ?
Yes. But scanner position is important to be placed in such way to cover as much as possible volume. No matter where markers are.
In some domains, food industry for example, is forbidden to put markers to not contaminate rooms or areas. Then registration must be done manually.
0 -
Thanks all,
I learned a lot.0 -
I would like to ask, can the handheld scanner I'm currently using with the SLAM algorithm export this kind of bubble? Currently, I only have a bubble at the starting point. After subsequent scans, there are no bubbles.
0 -
hi,
Som SLAM scanners do have the option to create 'waypoints' along the path during import. It is not exactly the same as scanposition, because it is only the panoramic image. We do support those and when available they will appear as blue bubbles in the model. The only difference is that they can not be used as input for commands.
If you think your scan contains these waypoints but are wrongly imported or if you are interested in creating virtual bubbles, please create a support request.
0



